
无动力设计和有动力设计是单通道洗靴机等工业设备中常见的两种设计思路,它们在动力来源、工作原理、性能特点、适用场景及维护成本等方面存在显著差异。以下从多个维度详细解析两者的区别:
一、动力来源与工作原理
无动力设计
动力来源:wan全依赖自然力或人工机械作用,无需外部电力、液压或气压驱动。
工作原理:
水流重力驱动:利用高处水槽的重力形成水流冲击力,冲刷靴子表面污渍(如单通道洗靴机中,水流从顶部喷淋而下)。
机械摩擦驱动:通过矿工行走时靴子与洗靴机底部的接触,带动内部传动装置(如齿轮、链条)使刷辊旋转,实现刷洗功能。
弹簧或重力复位:部分无动力设备(如某些闸门)利用弹簧或重力实现自动复位,无需额外动力。
典型案例:无动力单通道洗靴机、无动力滚轴筛(通过物料自重和滚轴旋转分离杂质)。
有动力设计
动力来源:依赖外部能源,如电力、液压油或压缩空气。
工作原理:
电机驱动:通过电动机带动刷辊、水泵或传动机构运转(如双速回柱绞车中的电机驱动卷筒旋转)。
液压/气压驱动:利用液压泵或气泵提供压力,推动活塞或气缸运动(如液压支架的升降)。
自动控制:结合传感器、PLC控制器等实现自动化操作(如有动力洗靴机通过红外感应自动启动清洗程序)。
典型案例:有动力洗靴机、电动绞车、液压钻机。
二、性能特点对比
特性 无动力设计 有动力设计
节能性 无需外部能源,节能huan保 依赖电力/液压,能耗较高
运行成本 低(仅需定期维护) 高(电费、液压油更换等)
清洁效率 依赖水流压力和刷毛摩擦,效率中等 电机驱动刷辊高速旋转,效率更高
清洁效果 适合轻度污渍,深度清洁能力有限 可调节清洗力度,适合重度污渍
结构复杂度 简单(少电机、传感器等部件) 复杂(含动力系统、控制电路)
可靠性 高(故障率低,维护简便) 较低(动力系统易损,需专业维护)
自动化程度 手动或半自动(需人工触发) 全自动(感应启动、程序控制)
适用环境 潮湿、多尘、无稳定电源的矿井 需稳定电源或液压/气压支持的场所
三、适用场景分析
无动力设计适用场景
资源受限环境:如煤矿井下(无稳定电源)、野外作业(依赖自然力)。
低成本需求:预算有限或对能耗敏感的场所(如小型矿山、临时工地)。
简单清洁任务:清洗轻度污渍(如煤泥、尘土),对清洁效率要求不高。
an全要求高:避免电气火花引发爆炸(如瓦斯矿井中优先选择无动力设备)。
有动力设计适用场景
高强度作业:需快速、深度清洁的场所(如大型煤矿、金属矿井口)。
自动化需求:需与生产线联动或实现无人值守(如自动化洗靴通道)。
复杂工况:清洗重度污渍或te殊材质(如油污、化学残留,需高压水qiang或旋转刷头)。
稳定环境:有可靠电源或液压/气压支持的场所(如工厂车间、洗选厂)。
四、维护与成本对比
无动力设计
维护内容:定期清理洗靴槽、检查刷毛磨损、润滑传动部件(如链条)。
成本构成:主要为人工维护费用,无能源消耗成本。
寿命周期:结构简单,寿命较长(通常5-10年)。
有动力设计
维护内容:更换电机、液压泵、传感器等易损件,定期检修电路或液压系统。
成本构成:能源费用(电费/液压油)、备件更换费用、专业维护人工费。
寿命周期:受动力系统影响,寿命较短(通常3-8年)。
五、典型案例对比
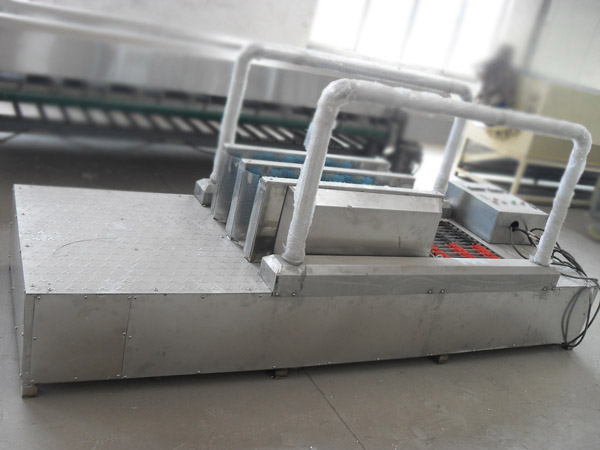
无动力单通道洗靴机
场景:小型煤矿井口,人流量较小,预算有限。
优势:无需电源,安装简便,运行成本低。
局限:清洁效率较低,需矿工停留或缓慢行走。
有动力多通道洗靴机
场景:大型煤矿井口,人流量大,需快速清洁。
优势:全自动感应启动,多排刷辊同步清洗,效率高。
局限:需稳定电源,初期投资和维护成本较高。
六、选型建议
优先无动力设计:若场景满足以下条件:
无稳定电源或需防爆;
预算有限且对清洁效率要求不高;
需简单、可靠的设备以降低维护成本。
选择有动力设计:若场景满足以下条件:
需高强度、自动化清洁;
有稳定电源或液压/气压支持;
预算充足且追求长期gao效运行。
在总结单通道洗靴机的动力设计与有动力设计区别时,我们可以清晰地看到:无动力设计的单通道洗靴机依赖于工人的行走摩擦力和喷淋水流来实现清洗,这种设计简化了维护流程,降低了能耗,并且提高了an全性,尤其适合煤矿井下等需要严格控制电力使用的环境。而有动力设计的洗靴机,则通过电动机等动力装置驱动刷子和清洗系统,能够提供更强烈的清洗效果,适合对清洁度有更高要求或清洗任务更繁重的场所。两者各有千秋,用户可根据具体应用场景和需求来选择zui合适的洗靴机类型。
电话:18660760370
邮箱:272100
地址:山东省济宁市高新区开源路北11号
